Nippon Telegraph and Telephone Corporation
FURUNO ELECTRIC CO., LTD.
Multi-path-tolerant GNSS receiver developed, dramatically increasing accuracy in severe environments
Nippon Telegraph and Telephone Corporation (NTT, Head office: Chiyoda-ku Tokyo; President & CEO: Jun Sawada) and FURUNO ELECTRIC CO., LTD. (FURUNO, Head office: Nishinomiya, Hyogo Prefecture, President: Yukio Furuno) have developed a receiver for GPS and other global navigation satellite systems (GNSS), dramatically improving time-synchronization accuracy in areas with severe reception conditions such as among buildings and in mountainous areas.
By integrating a new satellite signal selection algorithm developed by NTT into a time synchronization GNSS receiver from FURUNO, in addition to signals from satellites in line-of-sight locations, it has become possible to use multi-path signals (reflected or diffracted from buildings and other structures), which previously inhibited accuracy of time synchronization. In a real multi-path reception test environment, time error was reduced to approximately 1/5 of earlier values. This is a remarkable result in that it promises to enable time synchronization accuracy close to that obtained in open-sky reception environments with no obstructions, even in environments previously considered poor and unsuitable for accurate time synchronization, such as among buildings or in mountainous areas.
FURUNO plans to begin sales of their new GF-88 series time synchronization GNSS receivers incorporating this new technology in April of 2019, and to deploy it widely in fields such as 4G/5G mobile base stations, financial trading, power grids, and data centers.
We plan to exhibit these results at Tsukuba Forum 2018*1 on October 25 and 26 (https://www.tsukuba-forum.jp/e/index.html), and at ITSF 2018*2, in Bucharest, Romania on November 5 to 8 (http://itsf2018.executiveindustryevents.com) .
 Satellite selection algorithm and GNSS receiver prototype performance test results
Satellite selection algorithm and GNSS receiver prototype performance test results
Background
Accurate time synchronization with Coordinated Universal Time (UTC*3), using Global Navigation Satellite Systems (GNSS) such as GPS, is used in a wide range of fields for synchronizing mobile base stations, financial trading, earthquake measurements and other purposes. Particularly in recent years, mobile base stations based on TD-LTE*4 and other TDD*5 methods are spreading globally and require transmitted signals to be synchronized accurately, down to the microsecond, to avoid interference of signals between cells.
However, in non-ideal reception environments such as among buildings or mountains, with structures surrounding the antennas the open area, where signals from navigation satellites can be received directly, is limited and reception of multi-path signals reflected from or diffracted by surrounding structures can significantly degrade the accuracy of time synchronization. Measures to improve accuracy of time synchronization have been studied in the past, including placing antennas in locations where they can receive signals directly from greater numbers of visible satellites, and also filtering based on the elevation of the signal direction or a signal strength threshold to exclude signals from non-line-of-sight satellites that cannot be seen directly from the receiver location. Even so, these earlier methods were not always able to ensure adequate accuracy, and also had issues with reliability.
As such, NTT has developed a new GNSS receiver algorithm for selecting suitable navigation satellite signals, and conducted measurements to verify the effectiveness of this algorithm.
Research description and results
To compute the four parameters for position and time from navigation satellite signals, signals from at least four satellites must be received, but it is not always possible to receive four or more signals from visible satellites in so-called “urban-canyon” environments obstructed by surrounding buildings. In this study, we have conceived a new satellite selection algorithm in which satellite signals suitable for improving the time accuracy are selected in an iterative selection process based on the estimated reception location and the signal arrival times.
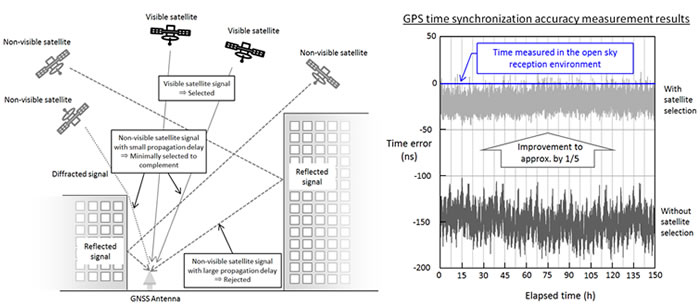
As shown in Figure 1, this algorithm first selects the signals from visible navigation satellites, and if there are fewer than four, it also selects the minimal number of signals with the smallest propagation delay from non-visible satellites. Thus, in poor reception environments, accuracy is improved by aggressively pruning unsuitable satellite signals. This could be called a “select few” satellite selection method. We developed a prototype, with this algorithm incorporated into the GF-87 time-synchronization GNSS receiver from FURUNO (Figure 2), and evaluated its performance in a test environment with multi-path reception. We were able to demonstrate accurate time synchronization with time error of approximately one fifth that of earlier devices.
Since this method is able to select the best satellite signals regardless of the number of visible satellites in the environment, antennas can be installed with less attention to the location, and significant increases in accuracy of time synchronization can be expected in a wider range of reception environments.
Technical details
We assume that when time synchronizing with navigation satellites, signals from at least four satellites must be received simultaneously to compute the four parameters of time and the 3D coordinates of the receiver location.
In non-ideal reception environments, with buildings or other structures surrounding the receiver, time synchronization accuracy is degraded mainly for the following two reasons.
-
Limited open sky area, where navigation satellite signals can be received directly
There are too few signals from satellites that are visible overhead, in line-of-sight positions from the receiver, or time synchronization accuracy is degraded due to the dispositions of the visible satellites overhead (with decreased DOP*6 value).
- Effects of non-direct, multi-path signals reflected/diffracted by nearby structures
As shown in Figure 3, multipath signals from visible and non-visible satellites affect the accuracy of time synchronization and position measurements very differently.
For the signals from a visible satellite, the stronger, direct signal is received first, before the relatively weaker multi-path signal, so the effects can be cancelled effectively through signal processing in the correlator*7 of the GNSS receiver.
Conversely, since there is no direct signal from a non-visible satellite, the effects can only be cancelled by not using (filtering) the satellite signal for time synchronization. As the sensitivity of the GNSS receiver increases, this latter effect becomes particularly noticeable, and can become a significant cause of degradation in time synchronization.
Elevation masks and carrier-to-noise-ratio (CNR*8) masks are methods that have been used in the past to cancel signals from non-visible satellites. Elevation masks improve accuracy by using satellite signals with an elevation angle greater than a threshold, and excluding signals that are more likely to be from non-visible satellites.
CNR masks improve accuracy by selecting signals with CNR greater than a threshold, excluding signals that have been attenuated due to reflection or diffraction. However, these masking methods had limited effect in improving time synchronization accuracy because they could not distinguish between visible and non-visible satellite signals accurately enough. There is also a risk that by pre-setting such a threshold, over time there could be interruptions in selecting the four satellite signals needed.
To deal with these issues in poor reception environments, NTT’s satellite signal selection algorithm first reliably selects signals from visible satellites, and if at least four visible satellite signals are not available, it selects a minimal number of complementary signals with low propagation delay from among those from non-visible satellites (Figure 1). When antennas are installed in locations such as the roof of a building, the open overhead space can be severely limited by nearby structures, but the propagation delay of reflected signals from satellites that are not visible due to these structures tends to be short.
Active use of signals from non-visible satellites in this sort of reception environment is the main feature of our algorithm. Regardless of the number of signals from visible satellites, it is able to select the satellite signals in the reception environment that are the best for improving accuracy. A comparison of our technology with a conventional CNR masking method is shown in Figure 4. The algorithm is able to select the best satellites to improve accuracy in all kinds of reception environment, whether restricted or having an open sky.
We created a model reception environment for multi-path reception and evaluated performance of the algorithm (Figure 5). By comparing results with times measured in an open-sky reception environment, we confirmed that time-error when using the prototype GF-87 GNSS receiver equipped with our algorithm decreased to approximately one fifth of otherwise (Figure 6).
We also developed an azimuth masking feature to use instead of the conventional elevation mask (Figure 7). This feature sets an elevation threshold for each azimuth direction, enabling masks of arbitrary shape to be formed using a GUI configuration tool.
Application of these technologies promises to enable highly accurate time synchronization of 100 ns or less, as required for the PRTC*9 in ITU-T Recommendations*10, even with antennas installed near structures, buildings or locations such as at windows in buildings. This should greatly expand the range of locations where antennas can be installed effectively and time synchronization can be achieved.
Future prospects
FURUNO is planning to release the GF-88 series, highly-accurate time-synchronization GNSS receiver modules implementing this NTT-developed technology in April of 2019.
As with earlier systems, the GF-88 will support GPS, GLONASS and the Quasi-Zenith Satellite System (QZSS), and also Galileo satellites. It also supports simultaneous reception from four QZSS satellites including a geostationary satellite Michibiki-3. We expect that supporting multi-GNSS*11 will increase the total number of navigation satellites that can be used. Thus, more satellites will be visible in environments with restricted open sky, greatly increasing the effectiveness of our technology to exclude un-needed signals from non-visible satellites, and realize highly-accurate time synchronization. The GF-88 series also includes a model that implements high holdover performance using a precision crystal oscillator, so that it can maintain high time precision even when the satellite signal cannot be received temporarily due to jamming or other interfering signals. This can be applied to applications requiring high reliability, such as 5G mobile base stations, or applications in finance or power grids.
NTT is also continuing research to further expand application areas for GNSS.
We plan to exhibit this technology at the NTT booth at “Tsukuba Forum 2018,” held by NTT Access Network Service Systems Laboratories on October 25 and 26.
FURUNO also plans to conduct the first ever active demonstration of multipath countermeasure performance of this technology at “ITSF2018”, held in Bucharest, Romania on November 5 to 8, by measuring the time error of a time synchronization GNSS receiver using simulated multipath signals.
For inquiries regarding this article
- Nippon Telegraph and Telephone Corporation
- Information Network Laboratory Group,
Planning Department, Public Relations Office
- E-mail:

- FURUNO ELECTRIC CO., LTD.
- Management Planning & Intelligence Dept.,
Public Relations Office, Mr. Kazushi Yamada
- E-mail:

Reference/Terminology descriptions
*1 Tsukuba Forum 2018
The largest general symposium on various technologies related to access networks in Japan, held by NTT.
https://www.tsukuba-forum.jp/e/index.html
*2 The International Timing & Sync Forum (ITSF) 2018
The largest conference in the world on the theme of network timing and synchronization, covering fields including communications, finance, energy, transport, broadcast and defense.
http://itsf2018.executiveindustryevents.com
*3 UTC: Coordinated Universal Time
Global standard time, managed based on international atomic time. Standard time in each country is set using UTC as the standard. Japan Standard Time (JST) is 9 hours ahead of UTC.
*4 TD-LTE: Time Division duplex Long Term Evolution
One form of the Long Term Evolution (LTE) mobile communications standard. In Japan, licenses are allocated to operators in the 3.4 GHz band (3400 MHz to 3600 MHz; band 42).
*5 TDD: Time Division Duplex
A communications scheme in which signals on the uplink, from the terminal to the base station, and on the downlink, from the base station to the terminal are multiplexed, alternating on the time axis. Also called time division multiplexing.
*6 DOP: Dilution Of Precision
An index of the accuracy of positioning and time synchronization based on positions of GNSS satellites above.
*7 Correlator
A signal processing circuit within a GNSS receiver that identifies and measures the arrival time of a satellite signal by correlating with a replica signal generated on the GNSS receiver, using a code signal particular to the navigation satellite.
*8 CNR: Carrier-to-Noise Ratio
The ratio of the strength of a received GNSS signal carrier to the noise level, expressed in units of dBHz. Higher values indicate better received signals.
*9 PRTC: Primary Reference Time Clock
Equipment that supplies standard time to the master clock used on a time synchronization network; usually synchronized with a GNSS signal. ITU-T Recommendation G.8272 specifies that it must not differ from UTC by more than ±100 ns.
*10 ITU-T Recommendation
International standards set by the Telecommunication Standardization Sector (ITU-T) of the International Telecommunication Union (ITU), which is a specialized agency of the United Nations.
*11 Multi-GNSS
A method of operation using a combination of multiple navigation satellite systems.
Figures
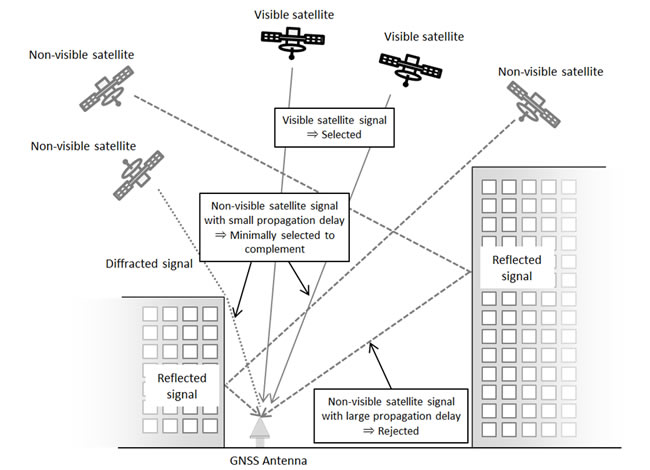 Figure 1: Satellite selection algorithm
Figure 1: Satellite selection algorithm
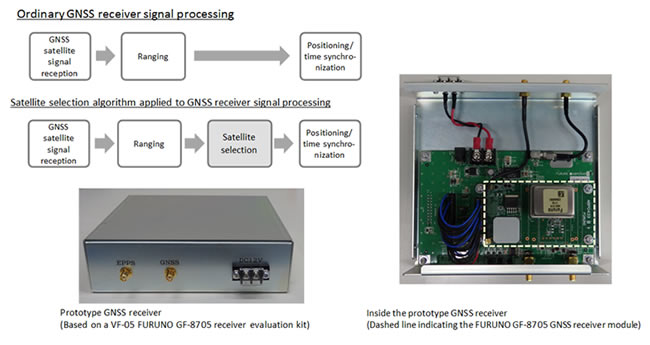 Figure 2: GNSS receiver prototype
Figure 2: GNSS receiver prototype
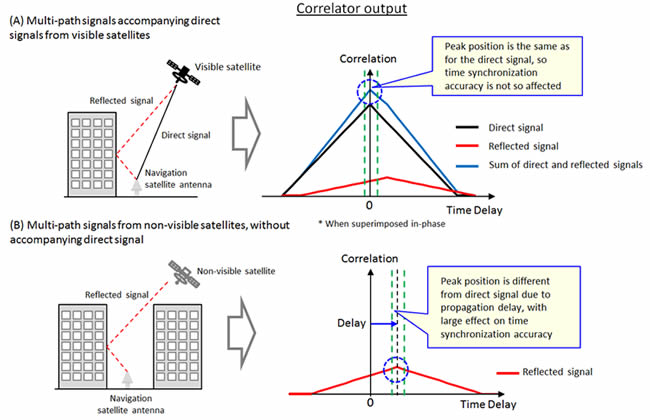 Figure 3: Effects of multi-path signals on time synchronization accuracy
Figure 3: Effects of multi-path signals on time synchronization accuracy
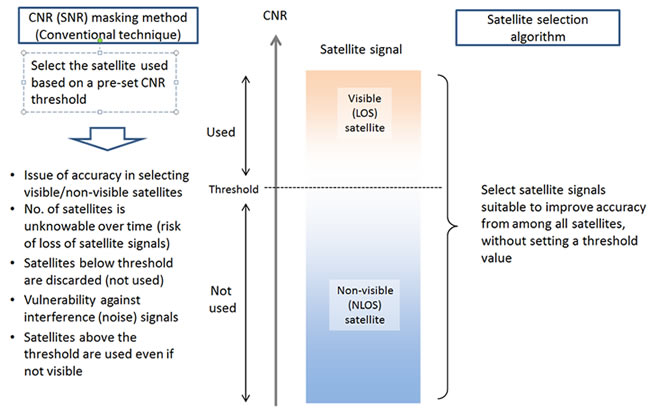 Figure 4: Comparison of satellite selection algorithm and CNR masking
Figure 4: Comparison of satellite selection algorithm and CNR masking
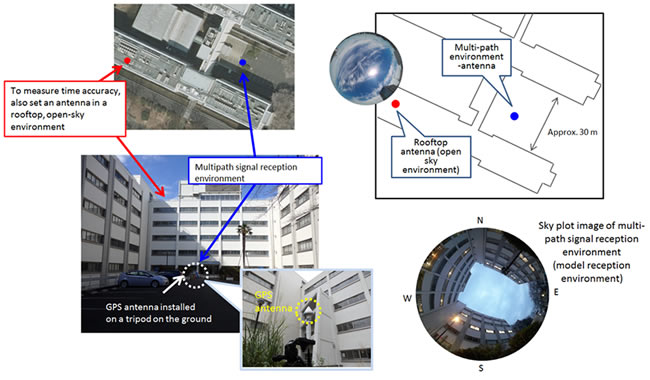 Figure 5: Model reception environment for evaluating effects of multi-path signals
Figure 5: Model reception environment for evaluating effects of multi-path signals
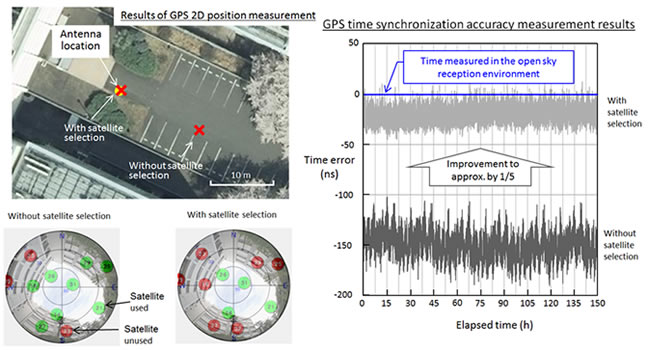 Figure 6: GNSS receiver prototype performance test results
Figure 6: GNSS receiver prototype performance test results
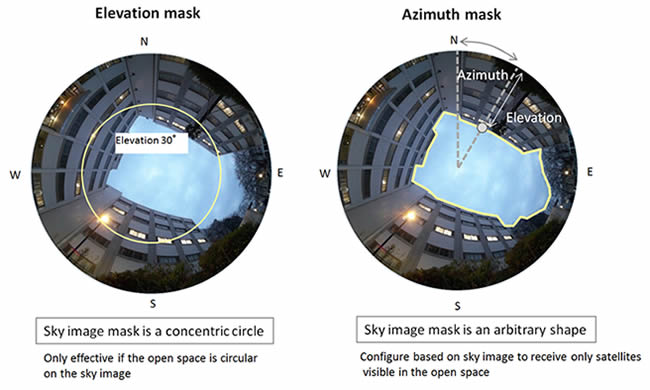 Figure 7: Azimuth mask function
Figure 7: Azimuth mask function